- ・WMX2 API + リアルタイムモーションAPI/リアルタイム機能API
- ・ユーザオリジナルのリアルタイムモーションやモーションコントローラを開発可能
- ・ロボット制御オプションによる産業用ロボットの制御に対応
- ・EtherCAT用ネットワーク構成ツール、ネットワークマネジメントAPIが付属
- ・1台のWindows PCでリアルタイムモーションコントローラ開発環境を構築
MXR2の特徴
MXR2は、WMX2のモーション機能に加えて、ユーザが独自のリアルタイム機能を開発するためのAPIを提供します。
最大の特徴はリアルタイムOSとの高い親和性で、よりシビアな動作時間や、より正確なモーションが求められる装置のアプリケーション開発に最適なモーションコントローラです。
産業用オープンプラットフォームのEtherCATに対応する独自開発のEtherCATマスタが付属し、サーボやI/Oモジュールには世界中のメーカから提供されるEtherCATスレーブを利用できます。
ロボット制御機能をオプションとして用意しており、ロボットと同時に一般的な回転軸やリニア軸を連動させる様なコントローラの開発にも最適なソリューションです。
用途
- ・半導体・液晶製造装置
- ・検査装置
- ・チップマウンタ、ボンディングマシン
- ・移送ロボット、ハンドリングロボット
MXR2コンポーネント
- ・EtherCATマスタ
- ・MXR2 + WMX2 API
- ・RTX (Real-Time拡張) + RTX SDK
- ・WMX2 Console(サンプルGUI)
- ・EtherCAT Network Configurator 2 (Network構成ツール)
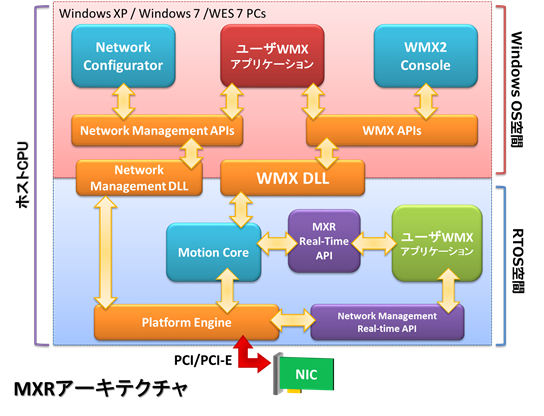
MXR2システム構成
MXR2 vs WMX2 Comparison
| WMX2 | MXR2 | |
| モーションコントロールAPI | Windows対応 | RTX対応 |
| ネットワークマネジメントAPI | Windows対応 | RTX対応 |
| ユーザアプリケーション | Windows上で実行 | RTX上で実行 |
| WMX API | 利用可 | 利用可 |
| MXR API | - | 利用可 |
| RTX SDK | - | MXR2とセット |